Mission Orchestration
Multiple Robots. One Operator.
Mission Planning and Management System (MPMS)
Ready to deploy & easily integrated into existing field systems.
The Mission Planning and Management System (MPMS) is a Modular Open Software Architecture (MOSA), vehicle-agnostic system that enables the coordination and control of multiple crewed and uncrewed assets to perform infinitely complex missions.
.
Enables force multiplication across all domains
Allows for a single warfighter to orchestrate missions across air, land, and sea with multiple heterogeneous assets.
- Graphical task editor allows for the design of multi-domain missions from one screen.
- Mission execution interface allows a user to view the complete mission as it unfolds in real-time.
AI-driven localized site management coordination
MPMS algorithms allow for assisted mission generation to reduce cognitive load
- Automatic asset assignment
- Automatic mission generation based on cost, risk, and schedule.
- Leverages existing intelligence source for conops, TTP’s
Integrates with all user interfaces
MPMS includes a Software Development Kit (SDK) and includes existing plug-ins for:
- Android Tactical Assault Kit (ATAK)
- Neya Systems’ proprietary user interface systems
Vehicle-agnostic, modular system architecture
Generates custom tasking and mission plans based on vehicle behaviors and capabilities, independent of actual vehicle implementations
- Modules for distributed network communications with MPMS assets
- Locally installed library of mission management services oversees the autonomous functions and manages inter-vehicle communications.
MPMS is a ready-for-operation planner-and-user interface that allows one operator to task and control any number of unmanned air, ground, surface, and fixed assets, in addition to tasking and monitoring manned assets.
MPMS provides end-to-end mission planning and management to support a wide range of mission capabilities, including reconnaissance, range clearance, route clearance, and medical resupply.
MPMS significantly enhances mission command and control, offering operational agility through advanced autonomous coordination. Using high-level scheduling and asset assignment, MPMS enables the coordination of existing behaviors within a system to complete a task.
By integrating manned and unmanned systems, MPMS optimizes decision-making, asset utilization, and enhances mission success in dynamic environments. Its vehicle-agnostic architecture provides a strategic advantage, ensuring that every decision is informed, every action is precise, and the collective mission capability is amplified.
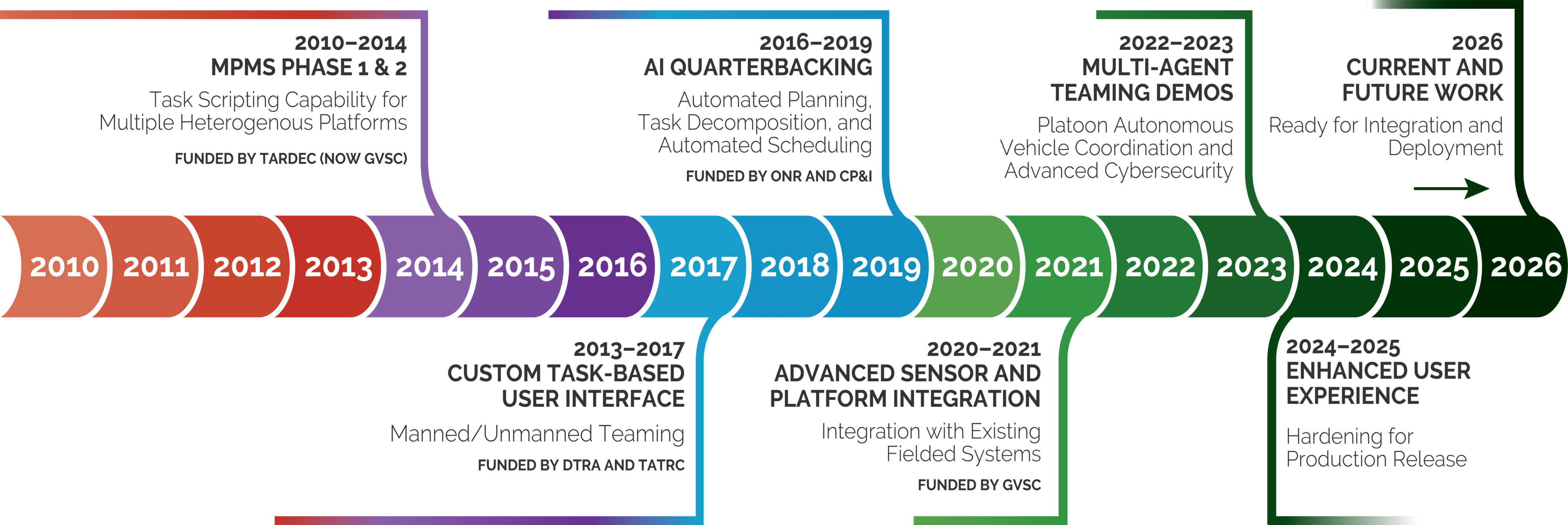
MPMS: MORE THAN A DECADE OF DEVELOPMENT & TESTING
Applications
Commercial
- Mining
- Construction
- Agriculture
Defense
- Force Protection
- Area Reconnaissance
- Re-Supply
- Hasty Attack
- Casualty Evacuation
Technical Features
Decentralized Distributed Control
MPMS uses decentralized distributed control, which allows each component or subsystem to operate autonomously and make decisions based on local information. This approach enables each component to respond dynamically to its immediate environment without relying on a central authority—a crucial feature in dynamic and uncertain outdoor environments.
Vehicle and Platform Agnostic
Using open architecture concepts built around the Joint Architecture for Unmanned Systems (JAUS), ROS-M, and Modular Open Systems Approach (MOSA), MPMS seamlessly integrates with a variety of air, ground, and subsurface vehicles. The system is vehicle and platform agnostic, which allows users to leverage existing hardware investments and integrate new technologies without being tied to specific vendors or proprietary solutions.
Graphic Mission and Task Creation Tools
MPMS uses intuitive graphic user interfaces (GUIs) that enable users to visually define and organize mission objectives, waypoints, trajectories and tasks without the need for any programming skills. Operators can interact with graphical elements such as maps and icons, making it easier to understand and manipulate mission parameters. The simplicity of these tools allows users to quickly become proficient without extensive training. Users can integrate Neya’s interface or provide their own, as MPMS integrates with a variety of GUIs, including ATAK.
Common Operating Picture (COP)
MPMS uses a Common Operating Picture (COP) to provide a comprehensive understanding of a system’s status, activities, and surroundings. This enables the system to gather, integrate, and display information from various sources into a unified and coherent view to enhance situational awareness, coordination, and decision-making among human operators and autonomous systems.
MPMS offers two different planning modes:
- A “manual” mode in which a human subject matter expert creates mission plans using MPMS tools.
- AI algorithms that automatically generate plans and schedules given high-level inputs.
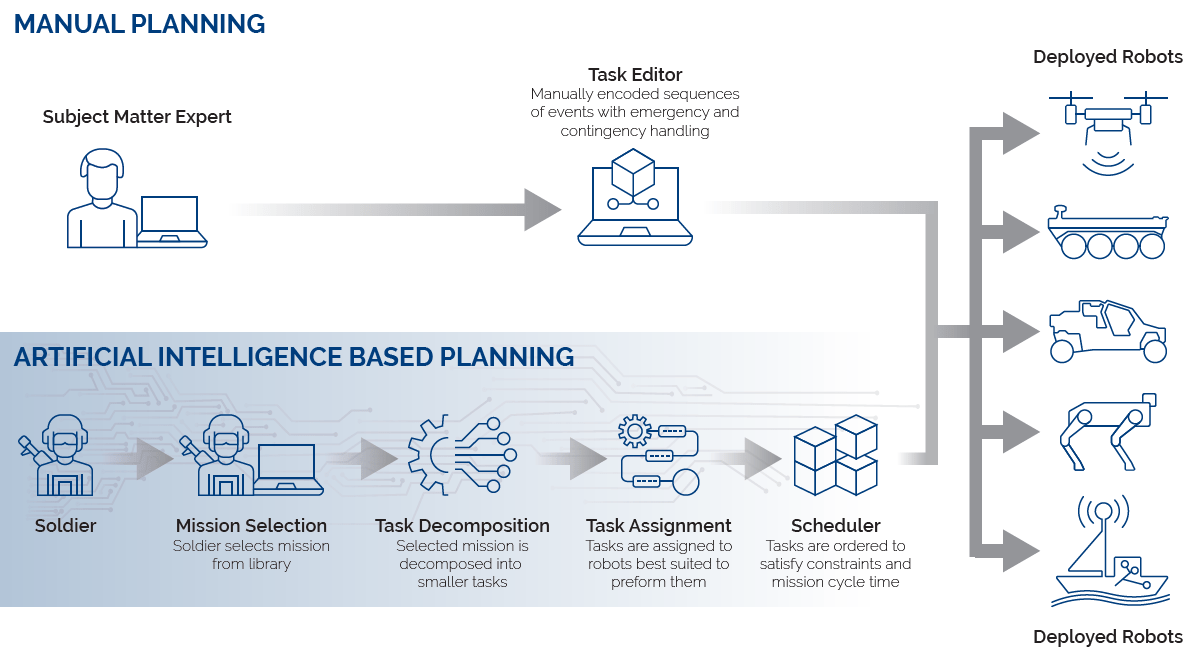
The Task Editor is used for “manual” mission planning. This works in cases where SMEs are available to create mission plans as needed. More typically, SMEs are not available, and minimally trained personnel will be required to create and execute missions.
In this case, we offer AI-based algorithms to assist in the planning process. These tools include task decomposition, task assignment, and task scheduling.