Perception & Machine Learning
Challenging Outdoor Perception Problems, Solved
Advanced Perception and Machine Learning Techniques for Field-Ready Autonomous Systems
Perception in Challenging Environments
Neya focuses on solving the complex perception problems faced when dealing with unconstrained environmental conditions. Combining a broad range of camera, stereo, LiDAR, infrared, radar, and sonar sensors, our solutions fuse information from the surrounding scene in real-time for navigation, object recognition, localization, and classification.

Negative Obstacle Detection
The detection of negative obstacles, such as holes and ditches, combines the use of three-dimensional point cloud data with LiDAR, electro-optical and thermal imagery to improve negative obstacle detection reliability. The reliable detection range for negative hazards determines the speed the vehicle can safely operate in dense, cluttered, off-road environments.
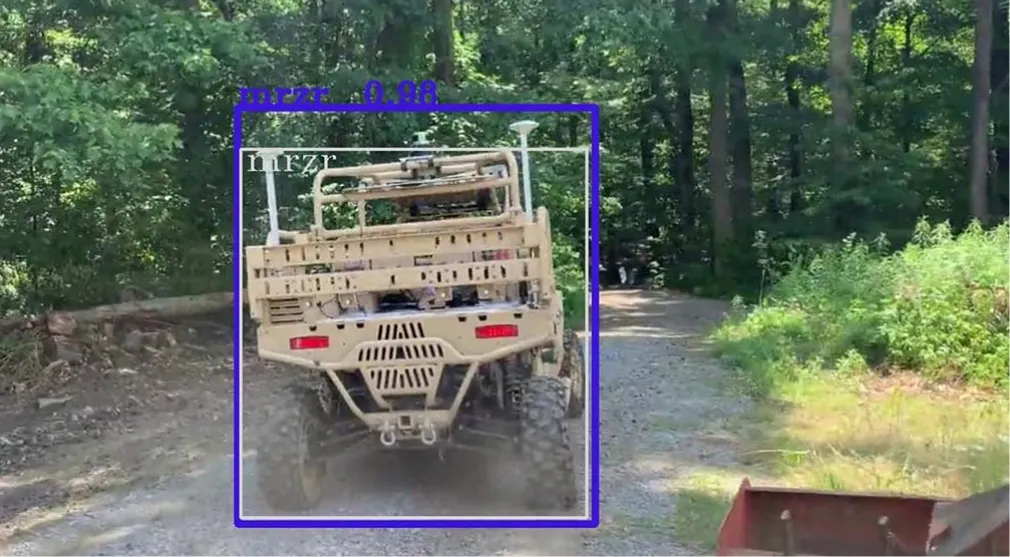
Deep Learning Classifiers
Neya uses deep learning techniques to solve difficult perception and classification problems for autonomy. We modify off-the-shelf networks or create and train new networks.
Negative Obstacle Detection
The detection of negative obstacles, such as holes and ditches, combines the use of three-dimensional point cloud data with LiDAR, electro-optical and thermal imagery to improve negative obstacle detection reliability. The reliable detection range for negative hazards determines the speed the vehicle can safely operate in dense, cluttered, off-road environments.
Deep Learning Classifiers
Neya uses deep learning techniques to solve difficult perception and classification problems for autonomy. We modify off-the-shelf networks or create and train new networks.
Neya’s A.I. Training, Inference, and Valuation Engine (NATIVE) standardizes key pieces of the A.I. pipeline to maximize reuse of research across projects.
NATIVE ensures machine learning training algorithms, metrics analysis functions, and live applications are implemented in a plug-and-play paradigm, where each can be updated without affecting the others.
Constructing our AI in this manner enables us to effortlessly integrate the most cutting-edge advances in research. This streamlined process involves adjusting only the necessary submodule when implementing changes. NATIVE has these functionalities built for a wide number of applications, including object recognition with automatic target recognition, anomaly segmentation for airport runway inspection, and time-series analysis for weapon-firing signature recognition.
Perception, Computer Vision, & Machine Learning Modules
Neya has a vast library of perception modules that can rapidly integrate into new applications.
- Obstacle Detection on Land & Water
- Negative Obstacle Detection
- Airborne Surface Estimation
- Depth Estimation Given a Single Image
- Sky/Land/Water Segmentation
- Object & Terrain Classification
- Object Tracking & Localization
- Image Enhancement & Upscaling