Open Architecture
Unmatched Open Architecture Expertise
Pioneering Open Architecture & Interoperability Standards Since 2009
Neya has been instrumental in developing every major DoD unmanned systems interoperability standard since being founded in 2009. We strongly believe that open architectures and interoperability enable innovation to thrive.
Neya supports both the technical development of standards (AS4-JAUS, Army IOP, AS4-UCS, ROS-M) and the use of Open Business Models to level the playing field for small businesses to develop innovative unmanned systems solutions.
INTEROPERABILITY
Neya is a strong proponent of interoperability. By ensuring that different robotic systems, components, and software can seamlessly communicate and work together, interoperability facilitates collaboration, innovation, and scalability. We build our autonomous systems using interoperability as a foundational principle. This enables our customers in both the defense and commercial domains to use our systems for a wide range of applications without having to invest in new hardware or proprietary interfaces.
JAUS TOOLSET
Neya is the primary developer of the JAUS Toolset (JTS), the only open source, freely available AS4-JAUS Software Developers Kit. JTS is in active use by multiple commercial and government organizations.
JTS capabilities include import and export of JAUS XML (JSIDL), graphical layout tools, and C++ code generation capability. JTS allows organizations and individuals new to IOP to rapidly integrate IOP Compliance into legacy and new software.
AS-4 STANDARDS
Neya has long been involved in standards development, providing leadership in the early days of the JAUS Reference Architecture for Comms, Payloads, and Autonomy. As JAUS migrated to SAE AS-4, Neya sponsored key publications like the Autonomous Behaviors and UGV Service Sets while serving in leadership positions in both JAUS and UCS. Neya continues this work as the only funded non-SETA industry participant in the IOP Working Groups, serving as lead for the Autonomy & Behaviors Task Group.
ROS-M
ROS-M is a software ecosystem for military RAS based on open ROS. It provides a trusted community of Government and Industry contributors with the means to collectively cultivate a federated body of re-useable, ROS-compatible software for developing defense robotic systems.
Neya Systems chairs the CCDC-GVSC ROS-M infrastructure group and is responsible for developing the physical ROS-M registry, database, and website to allow for a set of ROS compatible modules to be cataloged specifically for the DoD program use.
We work collaboratively with GVSC and other industry partners by conducting infrastructure working group meetings as well as tech lead meetings and defining and implementing the ROS-M concept.
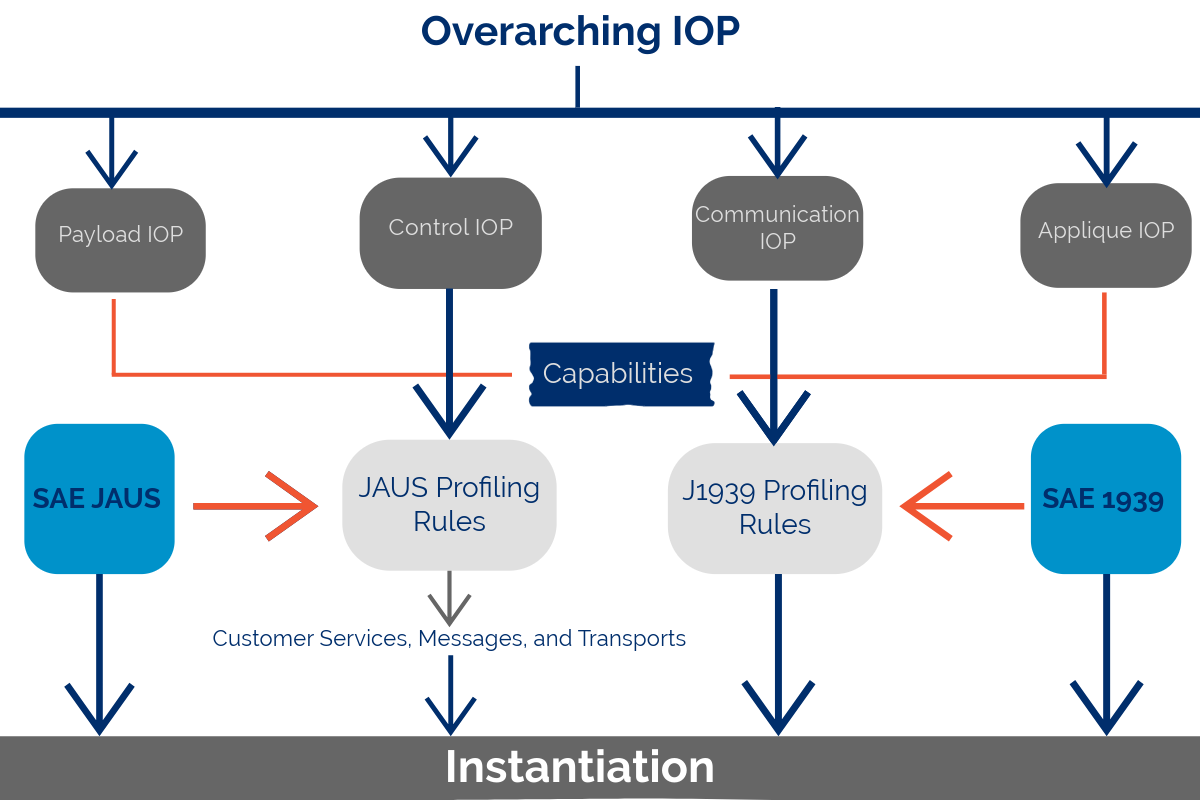
U.S. Army Robotics and Autonomous Systems - Ground (RAS-G) Interoperability Profile (IOP)