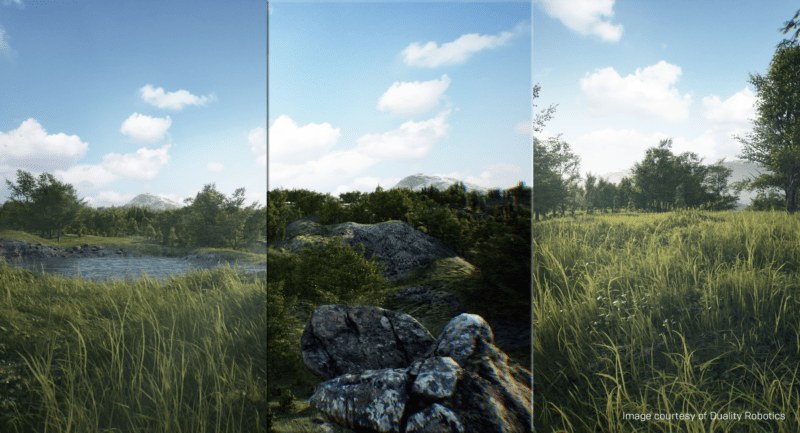
Neya Systems was awarded an RTC Contract to develop and demonstrate advanced path planning and maneuver selection technologies for high speed off-road unmanned ground vehicles. The Adaptive & Modular Multi Terrain Mobility Planner (AM3P) is a set of planning and simulation technologies focused on addressing the use of high fidelity terrain and kinodynamic vehicle models to enable high speed navigation. In this effort, Neya is working with Jet Propulsion Lab and Carnegie Mellon University to develop open-architecture based planning tools that can be integrated across a wide variety of existing and planned Unmanned Ground Vehicles. The AM3P system provides high-speed inertial maneuver planning and control within complex terrain while adapting to dynamically changing mission-dictated mobility constraints and objectives.